
I have a load limiter composed of a load cell and a BRIDGE-BOY.
When there is no load on hoisting device, the BRIDGE-BOY triggers unexpectedly.
Answer:
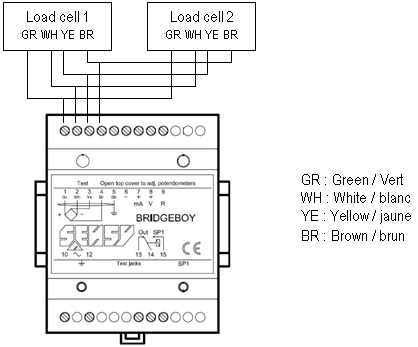
To ensure positive safety, the BRIDGE-BOY will set itself to fault when the output signal falls below -0.5 V.
 Set the hoisting device without any load. Measure the voltage between terminal 8 (+) and GND (-)
Set the hoisting device without any load. Measure the voltage between terminal 8 (+) and GND (-)
(see drawing above).
This signal may not be negative. If necessary increase it to 0 V or a slightly positive value (ex: 0.1 V) by using the zero potentiometer (Z).
What are the nominal supply voltages according to the different types of outputs offered by Sensy ?
Question : What is the best supply voltage for the strain gages sensors ?
Answer :
The value is mentioned on the calibration certificate delivered with the sensor.
For sensors without amplifier, the best common setting is 10V . It’s the voltage that is used to calibrate the load cell in the factory.
The maximum voltage allowed is 15V (350 ohms bridges) or 20V (700 Ohms bridges), depending on the model.
Remarks:
For some small models (eg 5932, 5962), it may be preferable to use a lower voltage (eg 5V) in order to limit the temperature rise of the sensor.
Some battery-operated signal conditioners use smaller voltages to save energy.
Can I put 2 dynamometric axes on a load limiter ?
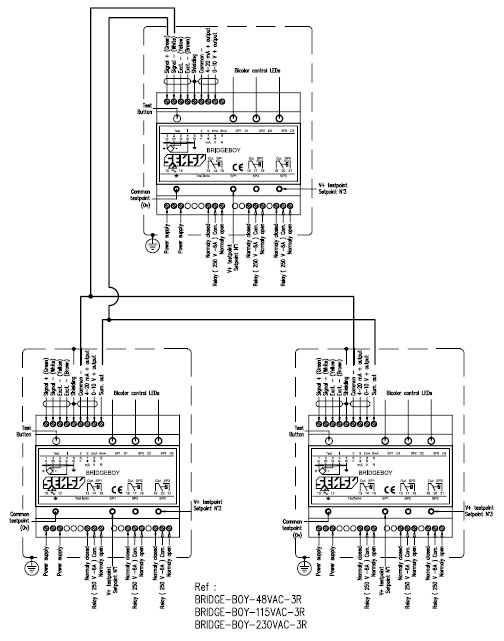
It is possible to connect 2 load-cells in parallel to a Bridge-Boy but in this case we cannot guarantee the positive safety.
The load limiter Bridge Boy has been designed for use with only ONE load cell in order to detect any problem on the load cell. For example, if a wire of only ONE load cell is cut, it is possible that the Bridge-Boy will not detect it.
For this reason is the CE certificate of compliance no longer valid in this case.
That is why we recommend the following schematics if you need to have a load limitation on the sum of the load of 2 load-cells.
CE certification is then available.
What is the maximum cable length available for an Exi certified sensor?
Answer:
It depends on the output signal of the sensor and values on the Exi certificate:
Example with our certificate ISSeP07ATEX012X:
- Non-amplified output (Wheatstone bridge – mV/V): Options I4 or I6
Our certificate ISSeP07ATEX012X specifies that:
- The capacitance of the cable may not exceed 14 nF
- The inductance of the cable may not exceed 10 µH
The capacitance of our standard cable (4 wires) is 130 pF / m, its inductance 0.7 µH / m. The maximum length is in this case 14 m because we then reach the maximum inductance.
2. Current output (4…20 mA – 2 wires) : Option C6
In this case, the same certificate specifies that:
- The capacitance of the cable may not exceed 53 nF
- The inductance of the cable may not exceed 150 µH
The capacitance of our standard cable (2 wires) is 150 pF / m, its inductance 0.65 µH /m. The maximum length is in this case 230 m because we then reach the maximum inductance
How to change the sensitivity range of the bridge-boy ?
Description
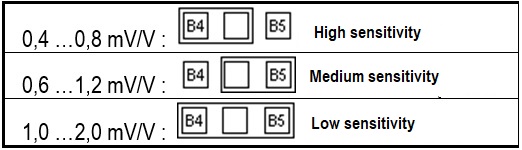
I can’t get the requested output signal using potentiometer S.
How do I change the sensitivity range of the BRIDGE-BOY ?
Answer
By modifying the B4-B5 soldering (see box in red) according to the table at the bottom of the page.

What is the required power supply for a sensor with integrated amplifier that provides a 4-20 mA (2-wires) signal?
Answer:
The particularity of the power supply for sensors equipped with a 4-20mA (2-wires) amplifier (Option C or C6) is that it depends on the value of the load resistance of the reading instrument (RL) increased by the resistance of the wiring (RW).
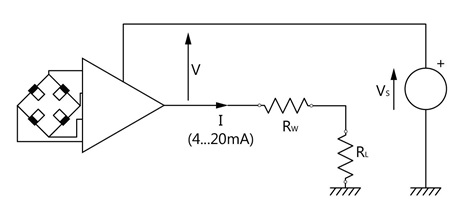
Indeed, for a correct operation, the power supplyat the terminals of the amplifier (V) must be at least 9 to 28VDC. However V = VS - I x (RL + RW) with I being able to reach 20 mA.
Consequently, Vs must be greater than or equal to 9 + (RL + RW) x 0.02.
Examples:
- Input resistance of the reading device RL: 33 Ohms Wiring resistance Rw: 4 Ohm. To be able to generate a 20mA signal, the supply voltage must be at least: 9V + ((33+4)*0.02) = 9.74V
2. With RL + RW = 1 kΩ (abnormally high value), VS must be at least: 9 + 20 = 29 V to be able to generate a 20mA signal with the specified linearity.
Likewise, for a specified supply voltage, the value of the sum of the load resistors will be limited to (VS - 9) / 0.02.
Example: With VS = 24 V, the value of RL + RW may not exceed 750 Ω in order to generate a 20mA signal with the specified linearity.
What is the accuracy of the INDI-PAXS ?
Answer:
The accuracy class of the INDI-PAXS indicated by Sensy is ±0.1% of full scale.
In fact this value can be defined more precisely:
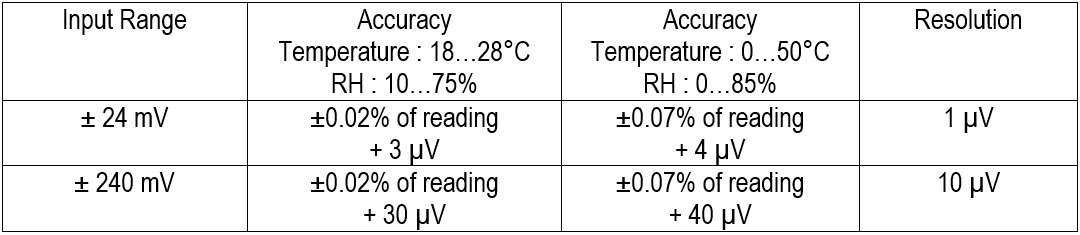
Example: the accuracy of the INDI-PAXS if connected to a sensor providing a signal of 2 mV/V, used between 18 and 28° C (relative humidity between 10 and 75%) and supplied with 10 V, the accuracy will be better than : ± 0.02% ± (3/20000) = ± 0.035% of full scale.However, in a temperature range of 0 to 50 ° C (0 to 85% relative humidity), this becomes: ± 0.07% ± (4/20000) = ± 0.09% of full scale.In these cases, the maximum resolution is 1/20000 = 0.005% of full scale.
Note :
- These values are only valid after a warm-up period of 20 minutes.
- For the temperature range 0-50°C, the thermal drifts are included in the specified accuracies.
- The maximum display refresh rate (dSP-t) is 10/sec. to enable internal zero compensation.
In addition to the above:
- The accuracy of the excitation voltage of the sensor (5 or 10 VDC) is ± 2%.
The maximum temperature drift (ratio metric) is 20 ppm/°C. - The accuracy of the analog output (option CARD-CDL10) is ±0.17% of full scale in the range of 18…28°C and ±0.4% of full scale in the range of 0…50°C.
Can a load pin be used in both directions ?
Answer:
Our load pins are based on the strain gauge technology. Thus, they can be loaded in both directions.
This is especially true if the signal is not amplified (i.e., mV/V).
In the case of an amplified signal (4..20mA), it will be necessary to shift the zero signal; for example, to 12mA.
In addition, at the end of manufacturing of the usual one direction load pins, they are loaded at 200% of their nominal load in order to ensure perfect zero stabilization. This operation is not performed for load pins intended to be used in both directions.
Therefore, it is necessary to specify it when ordering so that we can take it into account during manufacturing.
Remark:
Since the output signal may be zero, this may be a problem for the detection of wire break or short circuit in the context of positive safety.
Is it allowed to connect multiple sensors in parallel to the same overload protection electronics?
Note:
This is a common practice for weighing systems (unamplified mV/V signals).
Answer:
No, because positive safety is no longer guaranteed.Positive safety is the safety function of a load limiter that will trip when load cell/load pin signal is lost, whatever the cause may be.With several sensors connected to one load limiter (BRIDGE-BOY, CRANE-BOY or INDI-BOY), one failed sensor will not be detected and system keeps operating in an unsafe mode
Solutions are:
- Safe parallel connection using a JBOX-LCI Smart Junction Box.Indeed, the JBOX-LCI, beyond providing a summed signal to the load limiter, performs the monitoring of each individual sensor signal.
Remarks:
• Up to 4 sensors.
• The JBOX-LCI is powered by limiting electronics.
• It is usable with CRANE-BOY and INDI-BOY but not with BRIDGE-BOY.
• The impedance of the sensors can be 350 Ω for 2 sensors. It must be 700 or 1,000 Ω for 3 or 4 sensors. - Individual overload protection: each sensor connected to BRIDGE-BOY, CRANE-BOY, etc. and the sum of loads using summing electronics (BRIDGE-BOY (with E-SUM option), CRANE- SUMD and DISP-SUMD).
- For overload protection of 2 force sensors (or load pins) and on the sum of loads, the CRANE-BOYDP and DISP-BOYDP are overload protection electronics with 2 analog inputs.
Note: Input signal in V with option T or in mA with option J or C
What different types of rope reeving systems are used for lifting equipment?
Answer:
A rope reeving is a mechanical device with several pulleys commonly used on lifting equipment. It allows to lift heavy loads while limiting the force applied on the hoisting ropes.
There are many different types of rope reeving. For each one, there are one or more optimal locations to mount the force sensor (s) (loadcell on the cable, load pin, tension or compression sensor, wedge socket) which will allow the limitation of hoisted load. The choice of the type of sensor and its location will be based according to criteria such as the required accuracy, the possibility of loss of lifting height, the cost of equipment and assembly, etc ...)
Some of the most common examples are shown below (non-exhaustive list).
![]() indicate where to mount the force sensors.
indicate where to mount the force sensors.




What is the maximum length of measurement cables ?
Answer:
The maximum length of the measurement cables depends on many parameters. Some are internal because they depend on the type of signal (analogue, digital, mV / V, 4 ... 20 mA, RS-232, USB, etc.); others are external such as the electromagnetic and thermal environments of the installation.
In practice, simple precautions will easily prevent some pitfalls:
- Do not route measurement cables near power cables
- Always use faradised (shielded) cable and connect the shield to the ground.
- Preferably, use twisted pairs.
- Adapt the wire section to the length of the wiring.
A. Analogue signals
There are mainly 3 types of analogue signals for strain gage sensors:
- Non-amplified signal (Wheatstone bridge - mV / V)
This type of signal is not normally intended to be transported over long distance. It will therefore be limited to a length of 20 m taking into account the environmental conditions mentioned hereabove.
The use of sense lines at the power supply level eliminates the effects of temperature on power cables.
A larger section of cable (eg: 0.5 mm² instead of 0.14 mm²) also makes it possible to limit voltage losses and their thermal drift.
- Amplified signal 4..20 mA
This kind of analogue signal is an industrial standard.
It has the advantage of not being sensitive to the length of the cable and therefore being able to transmit a signal over several hundred meters.
In addition, it can detect any cut wire because the signal cannot be zero.
It exists in 2 versions:
- 2 wires where the sensor supply is provided by the measuring loop
- 3 wires where the sensor supply is provided by a 3rd wire.
However, the sum of the voltages at the inputs of the reading devices and the available supply voltage must be considered.
- Amplified signal 0 ... 10V and -10..0..+ 10V
This type of signal has the advantage of being able to connect the reading devices in parallel and thus without interrupting the measurement loop as is the case of 4..20 mA. This is particularly useful during checks.
It also makes it possible to keep the zero at 0 V, which gives an image closer to the measured quantity, particularly in the case of bidirectional sensors (eg tension + compression).
Considering the precautions mentioned above, we recommend 50m as maximum length.
B. Digital signals
- RS-232
This kind of connection is not intended for long distances.
The maximum cable length depends on the transmission speed
For example, it will be limited to 5 m in the case of a transmission to 19 200 Baud.
- RS-485
This kind of connection makes it possible to transmit signals over greater distances:
In addition, it allows to connect several devices on the same bus.
The maximum cable length also depends on the transmission speed.
Typically, with the use of line matching resistors, a length of 1200m is allowed up to a transmission rate of 100 kbps.
This maximum value may be limited by equipment manufacturers.
- USB
The USB standard does not allow a cable longer than 5m.
Note: There are repeaters that can extend this length up to 15m.
Why is it necessary to connect SENSY electronics and sensors to protective earth ?
Answer:
Grounding consists in connecting to a protective earth point with a conductive wire a metal structure that may be accidentally brought into contact with the electrical power grid caused by an insulation issue.
The grounding allows leakage currents to flow safely, combined with an automatic disconnection device (differential circuit breaker), it will switch off the electrical installation.
Why grounding ?
For user’s safety !
Example:
Take a SENSY electronics that is not connected to a grounded power outlet and a rodent that damaged the outer sheath of the power cable from this unit and its wires touch the housing
Touching the enclosure while being on a conductive floor will cause electric shock
Grounding combined with differential circuit breaker prevents such an incident.
The current flows directly into the ground and the power supply is automatically shut off.
No more electrocution, no more danger !
All SENSY electronics and sensors must be grounded !!!
Grounding is only effective if it is associated with a differential circuit breaker.
A good protective earth connection must have an electrical resistance calculate on the sensitivity of the differential device of the installation. The maximum resistance of the protective earth connection must be 100 ohms.
Rules to follow:
- Protective earth connection must be away from any deposit or infiltration that may corrode it (e. g. chemicals)
- Grounding connection should never be submerged by water.
- Water, gas or heating pipes and metal cable sheaths must not be used as protective earth.
What is the fatigue resistance of SENSY load cells and torque sensors?
SENSY force and static torque transducers measure with strain gauge bridges the deformation of metal body caused by application of mechanical stresses.
This mechanical stress may not exceed the elastic limit of the material without damaging or destroying the sensor.
However, even with overloads within the elastic limit of the material, alteration of the proof body will occur if these overloads are applied repeatedly.
This deformation, which is initially very small, can ultimately lead to sensor failure.
This fatigue resistance is characterized by a guaranteed number of cycles. It depends on the material, the stress rate (μm/m) and whether this constraint is uni- or bidirectional.
For SENSY steel sensors, the fatigue strength is as follows:

Caution: This is not valid for certain types of sensors for which the maximum stress is not located where the strain gauges are bonded.
(eg : membrane sensors).
How to tare a DIS P-Fx-yz display using an external contact.
Answer:
It is possible to tare a DISP-Fx-yz display using a potential-free external contact.
To do this:
- Make sure that the "Calib'n lock" dipswitch is in the "lock" position (on)
- Make a temporary contact between terminals 7 (Common) and 8 (CC.1), with push button for example.

What is the accuracy of an overload protection system for EOT crane using load pins.
The aim of this document is to analyze where the different measurement errors come from and to define their importance.
The measurement accuracy of an overload protection system is dependent of several factors:
- Accuracy of the load-pin
A load pin has essentially mechanical errors (non-linearity, hysteresis and non-repeatability). They depend on the dimensions of the axis (length / diameter ratio which cannot be too small) as well as the quality of the supports.For standard axes (5300 series), this error represents ± 0.5% of their full scale.If necessary, this error can be reduced to ± 0.2% by profiling the axis (feasibility to check).
On the other hand, if the ratio length / diameter is too small this error can go up to 5%.
As the thermal drifts of zero and sensitivity are less than 0.2% of full scale / 10° C, they are often negligible compared to mechanical errors. - Accuracy of the load limitation electronics
The accuracy of a load limitation electronics like Crane-Boy is of the order of ± 0.1%.
The error induced by these electronics is therefore generally negligible compared to other errors - Weight of the hoisting cable
Higher the load smaller is the part of cable supported by the load pin.
The importance of this error depends on the ratio between the cable weight and the nominal load hoisted.
The only way to cancel this error is to always do the measurements at the same height.
To eliminate this error, it will therefore be necessary to measure with the load at the same height or to provide a correction system taking into account the height of this height. - Errors due to frictions in the pulley blocks
The consequence of frictions in the various pulleys is that the apparent load on the load pin seems lighter when the load is being hoisted and heavier when the load is being lowered.
It is possible to lessen the influence of these frictions by always taking the measurement after the same hoisting or lowering action. - Errors due to dynamic phenomenon’s
The hoisted loads rarely stay still, and the resulting acceleration is added to that of gravity.
This influence can be lessened by treating the signal of the load pin with an adequate filtering of the electronics and by waiting for the load to be still.
Finally:
Considering a load pin with favorable dimensions and making calibration and load measurement always at the same height, after a rise in low speed, the accuracy of the measurement will be between ± 1 and 2% of the crane’s capacity.
Configuration of the RS232 output of INDI-5250 or INDI-00
- Go to menu SETUP:
Press , Enter Fn49 via keys
, Enter Fn49 via keys  and
and 
Validate via Display SETUP
Display SETUP
Validate via
- Modification of communication parameters
Press (1x) on to get SETUP2, pthen press
to get SETUP2, pthen press 
Verify all the parameters hereunder by pressing
2.t = 02
2.c = 65
2.l = 01
2.r = 00
2.a = 00
2.f = 00
2.e = 1
2.1 = 0
2.2 = 0
2.3 = 0
2.4 = 0
2.5 = 0
2.6 = 0
2.7 = 0
2.8 = 0
2.d = 17
SETUP2
Press to quit
to quit - Modification of the display update rate:
Press to display « Par »
to display « Par »
Press several times until « 6.P » appears and encode « 14 » by using
several times until « 6.P » appears and encode « 14 » by using 
Press to validdate
to validdate
Press to quit.
to quit.
- Save changes:
Press 2x to get « STORE » and validate by
to get « STORE » and validate by 
- Cable to usr:
RS232 cable used between the output of the INDI-5250’ and a PC must be crossed (TX and RX).
- Communication parameters:
2400 bauds – ATTENTION
7 data bits + 1 parity bit
or
8 data bits + 0 parity bit
1 stop bit
How to define different trigger thresholds from a button on our digital load limiters ?
Question: How to change the switching threshold on an INDI-PAXS through a switch or the F1 key
The PAXS has 2 lists of parameters, the main list and the auxiliary list, to go from one to the other by pressing F1 for example, it is necessary to go in the menu 2, and to give to F1, the function List. In this way, pressing F1 will display Load A and Load B respectively corresponding to main list and auxiliary list.
To set different thresholds, you just have to specify SP1 when you are in "LOAD A" mode and do the same after going into "Load B" mode.
Configuration of the pax family products in order to recover the value displayed on my PC or my PLC.
PAX configuration
I) RS232 configuration
1) Press PAR to enter in the menu
2) Go up to menu 7 Srl with F1
3) bAUd = 9600
4) dATA = 8
5) Addr = 0
6) Abru = yes
7) Opt = yes
8) 6roSS = No
9) tAre = no
10) IMP = yes
11) Tot = no
12) HI LO = no
13) Press PAR (exit)
II) Function configuration
1) Press Par
2) Go to menu 2 FNC
3) Usr-1 = Print
4) exit
III) Hardware configuration
Connect the terminal 7 (COM) to terminal 8 (USR1)
In this configuration, PAX send continuously the value displayed on the RS232 link.
How to apply a calibration resistor (Rcal) on a sensor already delivered ?
Answer:
Preliminary remarks:
- This procedure only applies to Wheatstone bridge sensors without internal amplifier.
- The output signal (Vout) is therefore of the mV/V type.
- It requires the use of a millivoltmeter with sufficient accuracy: (eg ± 0.01 mV).
- Pay attention to the polarity of the measured signals.
The recommended value of Rcal depends on the resistance of the sensor and the target signal to be generated.
Examples:
- For a sensor with a resistance of 351 Ω, a 50 kΩ Rcal will result in an imbalance of ± 1.75 mV/V
- For a sensor with a resistance of 702 Ω, a 120 kΩ Rcal will cause an imbalance of ± 1.46 mV/V
How to proceed:
- Connect the sensor to the power supply (eg 10 VDC)
- Wait a few minutes
- Measure the supply voltage (Vexc)Measure the output signal of the sensor without load (Vo). Ex .: If Vexc = 10 V and the nominal sensitivity (Vout) = 2 mV/V, Vo must be between -0.2mV and +0.2 mV
- Connect the calibration resistor between the '' Exc.+ '' and '' Signal + '' terminals. Rem. This connection can also be done between the '' Exc.- '' and '' Signal - '' terminals, but the results will be slightly different.
- Measure the output signal (Vr)
- Calculate the variation of the output signal: Vcal (mV/V) = (Vr-Vo)/VexcThe simulated mechanical quantity (force or torque) is equal to:Full Scale (FS)* (Vcal/Vout)
This simulated value is only valid for the specific sensor, Rcal and used terminals.
It is therefore recommended to physically associate these components and to record the used terminals as well as the calculated values.
Example:
Force sensor:
- Full Scale (FS): 100 kN
- The sensitivity indicated on the control certificate (Vout): 2.000 mV / V
- The resistance indicated on the control certificate 702 Ω
Calibration resistor (Rcal): 120 kΩ
Measurements:
- Sensor supply voltage (Vexc): 10.2 V
- Signal without load(Vo): + 0.02 mV
- Sensor signal with Rcal connected between Power supply. + and Signal +: + 14.62 mV
Results:
- Variation of output signal Vcal = (Vr-Vo) / Vexc: (14.62-0.02)/10.2 = 1.431 mV/V
- Simulated force (Fcal) = FS*(Vcal / Vout): 100*(1.431 / 2.000) = 71.55 kN
Note: The accuracy of this method depends on the accuracy with which the nominal sensitivity of the sensor (Vo) is known and thus also the repeatability error of the sensor.
What is the measurement and refresh rate of a display of the PAX series and its analog output (CARD-CDL10) ?
Answer :
a) Display
The measurement speed depends on 2 parameters:
- The parameter Filtr (menu 1-INP) adjustable from 0.0 to 25.0 sec and can be disabled by the parameter bANd (menu 1-INP) (see user manual).
- The dSP-t parameter (Menu 4 - SEC) can be set to 1, 2, 5, 10 or 20 measures / sec. which allows to configure the display refresh rate.
- In the case of the speed of 20 measurements / sec., the internal zero correction is disabled in order to allow the fastest response.
Step response:
- 200 msec. max. to within 99% of final readout value (digital filter and internal zero correction disabled) (Filtr = 0.0 and dSP-t = 20).
- 700 msec. max. (digital filter disabled, internal zero correction enabled) (Filtr = 0.0, dSP-t = 10).
b) Analog Output
The parameter Udt (menu 8 - Out) adjusts the refresh time from 0.0 to 10.0 sec. The value 0.0 corresponds to the maximum speed, ie 20 refreshes per second.
Update time:
- 200 msec. max. to within 99% of final output value (digital filter and internal zero correction disabled)
- 700 msec. max. (digital filter disabled, internal zero correction enabled)