
Que faire si un BRIDGE-BOY se déclenche de manière intempestive lorsque le levage est à vide?
Description
Je possède un limiteur de charge composé d’un capteur de force et d’un BRIDGE-BOY.
Lorsque le levage est à vide, le BRIDGE-BOY se déclenche de manière intempestive.
Réponse
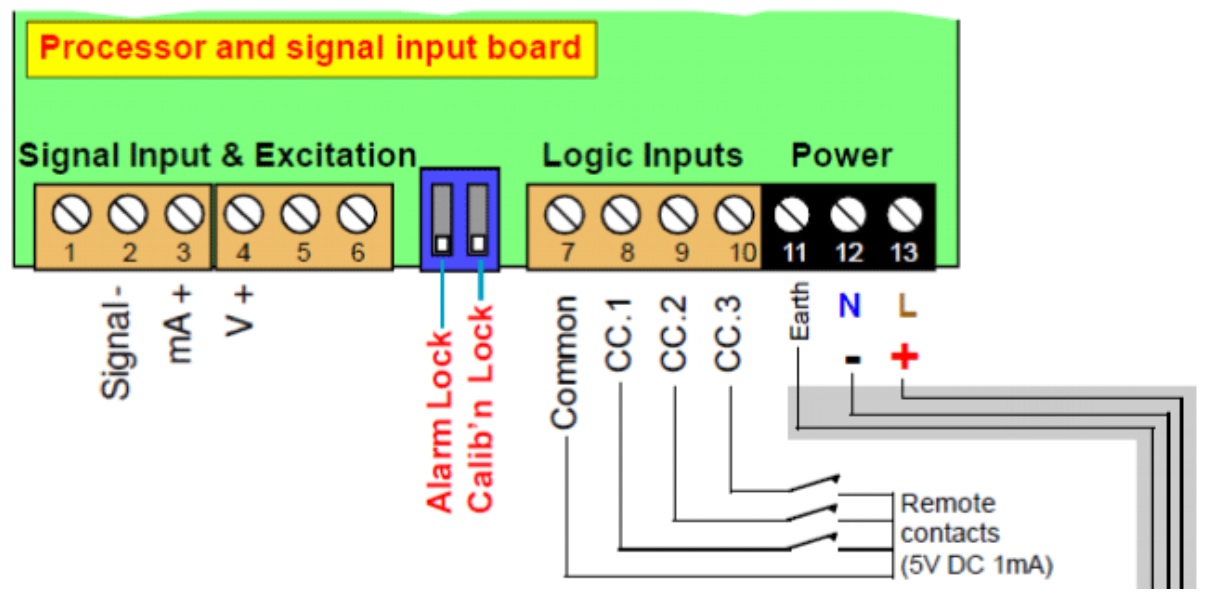
Pour garantir la sécurité positive, le BRIDGE-BOY se met en défaut lorsque le signal de sortie devient inférieur à - 0,5 V.
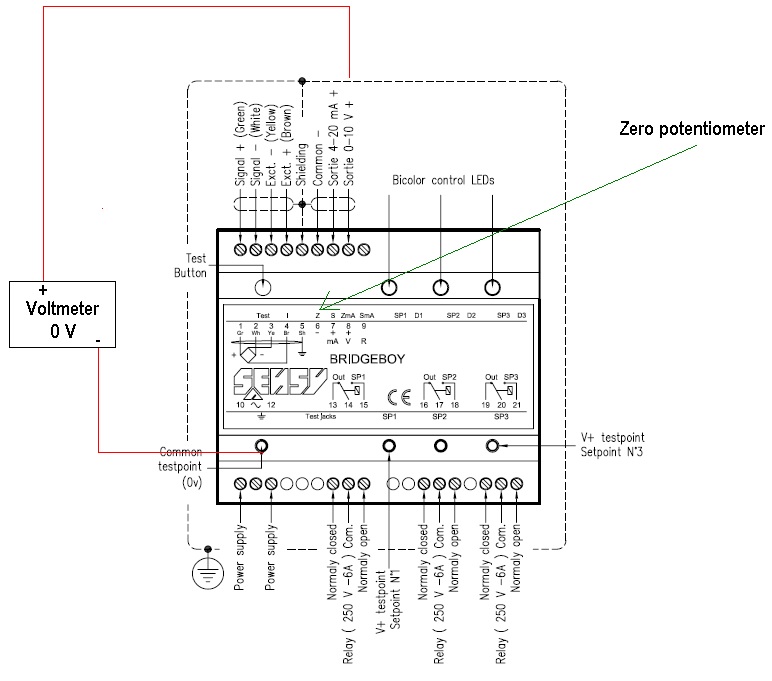
Mettre le levage à vide. Mesurer la tension entre la borne 8 (+) et la masse (-) (voir le dessin ci-dessus).
Ce signal ne peut pas être négatif. Si nécessaire, augmentez-le jusqu’à 0 V ou une valeur légèrement positive (ex. : 0,1 V) en utilisant le potentiomètre du zéro (Z).
Quelles sont les tensions d'alimentation nominales en fonction des différents types de sorties proposées par SENSY?
Question : Quelle la meilleure tension d’alimentation pour les capteurs à jauges extensométriques ?
Réponse :
Cette valeur est mentionnée sur le certificat de calibration fourni avec le capteur.
Pour les capteurs sans amplificateur, la valeur la plus courante est de 10V. C’est cette valeur qui est utilisée pour étalonner les capteurs en usine.
La tension maximale est de 15V (pont de 350Ω) ou 20V (pont de 700Ω), dépendant du modèle.
Remarques :
Pour certains petits modèles (ex : 5932, 5962), il peut être préférable d’utiliser une tension plus faible (ex. :5V) afin de limiter l’augmentation de température du capteur.
Certains conditionneurs fonctionnant sur batteries emploient des tensions plus faibles afin d’économiser l’énergie.
Puis-je mettre 2 axes dynamométriques sur un limiteur de charge ?
Il est possible de connecter 2 capteurs en parallèle à un Bridge-Boy mais dans ce cas nous ne pouvons garantir la sécurité positive.
Le limiteur de charge Bridge-Boy a été conçu pour être utilisé avec UN seul capteur afin d’en détecter toute défectuosité. Par exemple, si dans le cas où deux capteurs sont connectés, un fil d’un seul capteur se coupe, il est possible que le Bridge-Boy ne le détectera pas.
Pour cette raison, le certificat de conformité CE n’est plus valable dans ce cas.
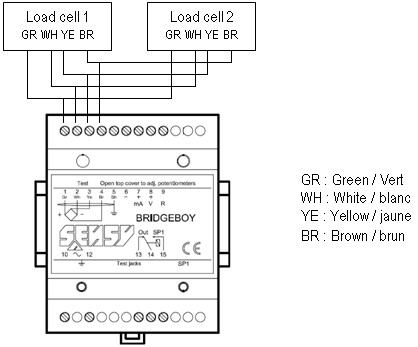
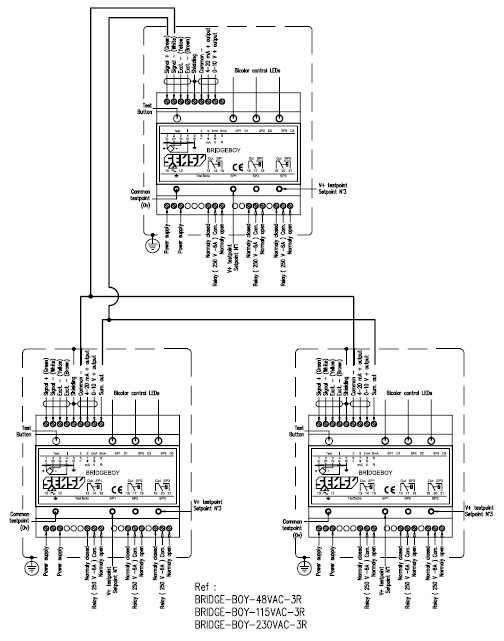
C’est pour cette raison que nous recommandons le schéma suivant pour réaliser la limitation de charge sur la somme des charges de 2 capteurs.
La certification CE est alors valable.
Quelle est la longueur de câble maximale que peut avoir un capteur certifié Exi ?
Réponse:
Cela dépend du type de signal de sortie du capteur:
- Sortie non amplifiée (pont de Wheatstone - mV/V) : Options I4 ou I6
Notre certificat ISSeP07ATEX012X spécifie que :- La capacité du câble ne peut dépasser 14 nF
- L’inductance du câble ne peut dépasser 10 µH
La capacitance de notre câble standard (4 fils) est de 130 pF/m, son inductance de 0,7 µH/m. La longueur maximale est dans ce cas de 14 m car on atteint alors l’inductance maximale.
- Sortie amplifiée (4…20 mA – 2 fils) : Option C6
Dans ce cas le même certificat spécifie que :- La capacité du câble ne peut dépasser 53 nF
- L’inductance du câble ne peut dépasser 150 µH
La capacitance de notre câble standard (2 fils) est de 150 pF/m, son inductance de 0,65 µH/m. La longueur maximale est dans ce cas de 230 m car on atteint alors l’inductance maximale.
Comment changer la plage de sensibilité du BRIDGE-BOY?
Description
Je ne parviens pas à obtenir le signal de sortie demandé à l'aide du potentiomètre S.
Comment changer la plage de sensibilité du BRIDGE-BOY?
Réponse
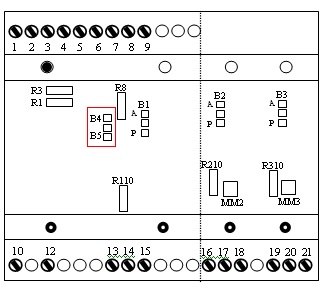
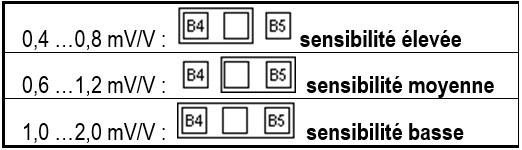
En modifiant le pont de soudure B4-B5 (voir encadré en rouge) suivant le tableau en bas de page.
Quelle est la tension d’alimentation nécessaire dans le cas d’un capteur de force avec amplificateur intégré fournissant un signal 4..20 mA en 2 fils?
Réponse :
La particularité de l’alimentation des capteurs de force équipés d’un amplificateur 4..20mA 2 fils (Option C ou C6) est que celle-ci dépend de la valeur de la résistance de charge de l’instrument de lecture (RL) augmentée de la résistance du câblage (Rw).
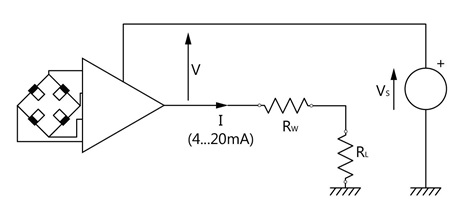
En effet, pour un fonctionnement correct, la tension d’alimentation aux bornes de l’amplificateur (V) ne peut être inférieure à 9 V. Or V = VS – I x (RL+Rw) avec I pouvant atteindre 20 mA.
En conséquence Vs doit être supérieur ou égal à : 9 + (RL+Rw) x 0,02.
Exemples :
- Résistance d’entrée de l’appareil de lecture RL : 33 OhmRésistance d’entrée de l’appareil de lecture RL : 33 OhmRésistance du câblage Rw : 4 OhmPour pouvoir générer un signal de 20 mA, la tension d’alimentation devra au moins être de :9 V + (33+4) x 0,02 = 9.74 V
-
Avec RL+Rw = 1 kΩ (valeur anormalement élevée), VS devra être d’au moins 9 + 20 = 29 V pour pouvoir générer un signal de 20 mA avec la linéarité spécifiée.
De même, pour une tension d’alimentation spécifiée, la valeur de la somme des résistances de charge sera limitée à : (VS – 9) / 0,02.
Exemple : Avec VS = 24 V, la valeur de RL+Rw ne peut dépasser 750 Ω (valeur anormalement élevée) pour pouvoir générer un signal de 20 mA avec la linéarité spécifiée.
Quelle est la précision de l’INDI-PAXS?
Réponse :
La classe de précision de l’INDI-PAXS annoncée par SENSY est de ± 0,1 % de la pleine échelle. En fait cette valeur peut être définie plus finement:
Exemple:
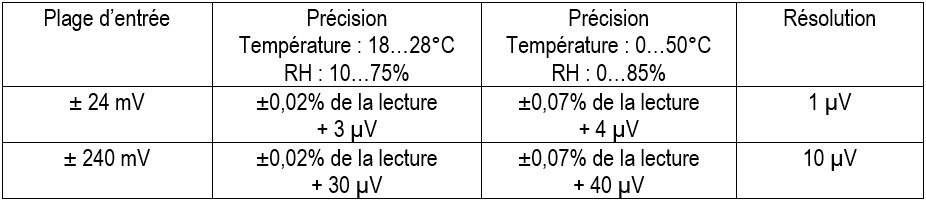
La précision de l’INDI-PAXS si connecté à un capteur fournissant un signal de 2 mV/V, utilisé entre 18 et 28 °C (humidité relative entre 10 et 75%) et alimenté en 10 V, la précision sera meilleure que : ±0,02% ±(3/20.000) = ±0,035% de la pleine échelle.
Par contre, dans une plage de température de 0 à 50°C (humidité relative de 0 à 85%), celle-ci devient : ±0,07% ± (4/20.000) = ±0,09% de la pleine échelle. Dans ces cas la résolution maximale est de 1/20.000 = 0,005% de la pleine échelle.
Remarques:
- Ces valeurs ne sont valables qu’après une période de préchauffage de 20
mn. - Pour la plage de température de 0 à 50°C, les dérives thermiques sont incluses dans les précisions annoncées.
- La cadence maximale de rafraîchissement de l’affichage (dSP-t) est de 10/sec. afin de permettre la compensation interne de zéro.
De plus:
- La précision de la tension d’alimentation du capteur (5 ou 10 VDC) est de ± 2%. Sa dérive thermique maximale (ratio metric) est de 20 ppm/°C.
- La précision de la sortie analogique (Option CARD-CDL10) est de ±0,17% de la pleine échelle dans la plage de 18 à 28°C ; et de ±0,4 % de la pleine échelle dans la plage de 0 à 50°C.
Peut-on utiliser un axe dynamométrique dans les 2 sens?
Réponse:
Nos axes dynamométriques sont basés sur la technologie des jauges de contrainte. Ils peuvent donc travailler dans les deux sens.
Cela est particulièrement vrai si le signal n’est pas amplifié (c’est-à-dire en mV/V).
Dans le cas d’un signal amplifié (4…20mA), il faudra décaler le zéro ; par exemple à 12mA.
Enfin, les axes « normaux » à un seul sens subissent une pré-charge pour parfaire la stabilisation du zéro. Cette opération n’est pas effectuée pour les axes destinés à travailler dans les 2 sens.
C’est pourquoi, il est nécessaire de le préciser à la commande afin que nous puissions en tenir compte lors de la fabrication.
Remarque:
Comme le signal de sortie peut être nul, cela peut poser un problème dans la détection de coupure de fil ou de court-circuit dans le cadre de la sécurité positive.
Peut-on brancher plusieurs capteurs en parallèle sur la même électronique de limitation de charge ?
Remarque:
C’est une pratique courante dans le domaine du pesage (signaux non amplifiés en mV/V).
Réponse:
Non, car la sécurité positive n’est alors plus garantie.
En effet, au cas où un capteur de force (ou axe dynamométrique) se débrancherait, l’électronique (BRIDGE-BOY, CRANE-BOY ou INDI-BOY) ne pourrait pas détecter cette défaillance dans tous les cas de figure.
Les solutions sont:
- Réaliser la connexion en parallèle à l’aide d’une boîte de jonction intelligente JBOX-LCI.En effet la JBOX-LCI réalise aussi et ce en continu le contrôle du bon fonctionnement de chaque capteur.
Remarques:
• Le nombre de capteurs est limité à 4.
• La JBOX-LCI est alimentée par l’électronique de limitation.
• Elle est compatible avec les CRANE-BOY et INDI-BOY mais pas le BRIDGE-BOY.
• L’impédance des capteurs peut être de 350 Ω pour 2 capteurs. Elle doit passer à 1.000 Ω pour 3 ou 4 capteurs. - Prévoir une électronique de limitation (BRDGE- BOY, CRANE-BOY, etc) par capteur et réaliser la limitation sur la somme à l’aide d’une électronique supplémentaire (BRIDGE-BOY (avec option E-SUM), CRANE-SUMD et DISP-SUMD).
- Dans le cas où il n’y a que 2 capteurs de force (ou axes dynamométriques), le CRANE-BOYDP et DISP-BOYDP sont des électroniques de limitation à 2 entrées assurant la limitation sur chacune d’elle ainsi que sur leur somme.Remarque : Ces entrées sont de type 4..20 mA. Les capteurs doivent donc être équipés d’un amplificateur (option J ou C).
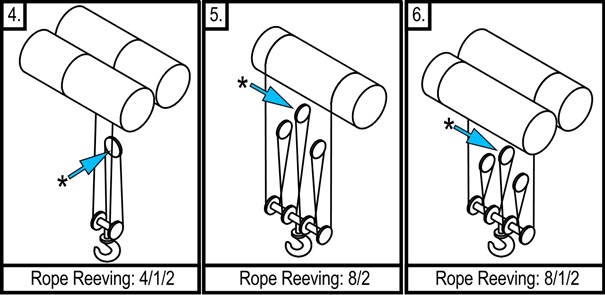
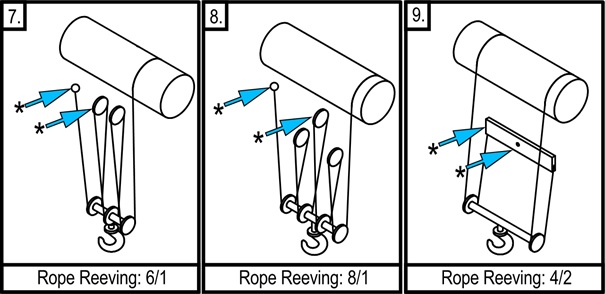
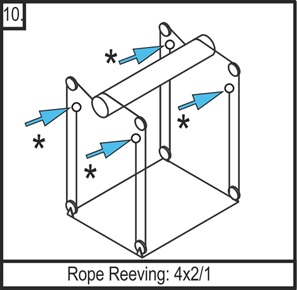
Quels sont les différents mouflages utilisés pour les engins de levage?
Réponse:
Un mouflage est un dispositif mécanique à plusieurs poulies couramment utilisé sur les engins de levage. Il permet de soulever des charges importantes tout en limitant la force exercée sur les câbles de levage.
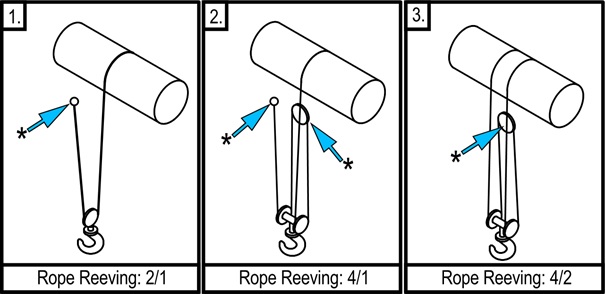
Il existe de nombreux types de mouflages différents. Pour chacun, il existe un ou plusieurs endroits optimaux pour monter le (les) capteur(s) de force (capteur sur le câble, axe dynamométrique, capteur en traction ou en compression, boîte à coin dynamométrique) qui permettront de réaliser la limitation de charge Le choix du type de capteur et de son emplacement se fera en fonction de critères tels que la précision requise, la possibilité de perte de hauteur de levage, le coût de l’équipement et du montage, etc…)
Quelques exemples les plus courant sont représentés ci-dessous (liste non exhaustive).
Les ![]() indiquent les endroits où monter les capteurs de force.
indiquent les endroits où monter les capteurs de force.
Quelle est la longueur maximale des câbles de mesure ?
Réponse:
La longueur maximale des câbles de mesure dépend de nombreux paramètres.
Certains sont internes car ils dépendent du type de signal (analogique, numérique, mV/V, 4…20 mA, RS-232, USB, etc.); d’autres sont externes tel que les environnements électromagnétique et thermique de l’installation.
En pratique, des précautions simples permettront d’éviter facilement certains écueils :
- Ne pas faire cheminer des câbles de mesure près de câbles de puissance
- Toujours utiliser du câble faradisé (blindé) et connecter le blindage à la terre.
- De préférence, utiliser des paires torsadées.
- Adapter la section des fils à la longueur du câblage.
-
Signaux analogiques
Il existe principalement 3 types de signaux analogiques pour capteur à jauges de contrainte:- Signal non amplifié (pont de Wheatstone - mV/V)
Ce type de signal n’est normalement pas prévu pour être transporté sur de grandes longueurs. On se limitera donc à une longueur de 20 m en tenant compte des conditions environnementales citées plus haut.
L’utilisation de lignes de recopie (sense) aux niveaux de l’alimentation permet de s’affranchir des effets de la température sur les câbles d’alimentation.
Une section de câble plus importante (ex. : 0,5 mm² au lieu de 0,14 mm²) permettra aussi d’y limiter les pertes de tension ainsi que leurs dérives thermiques. - Signal amplifié 4…20 mA
Ce type de signal est un standard industriel pour la transmission de type analogique.
Il a l’avantage de ne pas être sensible à la longueur du câble et donc de pouvoir transmettre un signal sur plusieurs centaines de mètres.
De plus il permet de détecter toute coupure de fil car le signal ne peut être nul.
Il existe en 2 versions :
- 2 fils où l’alimentation du capteur est assurée par la boucle de mesure.
- 3 fils où l’alimentation du capteur est assurée par un 3eme conducteur.
Il faut néanmoins tenir compte de la somme des tensions au niveau des entrées des appareils de lecture et de la tension d’alimentation disponible.
- Signal amplifié 0…10V et -10…0…+10V
Ce type de signal présente l’avantage de pouvoir brancher les appareils de lecture en parallèle et donc sans interrompre la boucle de mesure comme c’est le cas du 4…20 mA. Ceci est particulièrement utile lors des contrôles.
Il permet aussi de garder le zéro à 0 V ce qui donne une image plus proche de la grandeur mesurée notamment dans le cas des capteurs bidirectionnels (ex. : traction + compression).
Compte tenu des précautions citées plus haut, nous préconisons 50m comme longueur maximale.
- Signal non amplifié (pont de Wheatstone - mV/V)
-
Signaux digitaux
- RS-232
Ce type de connexion n’est pas prévu pour de grandes distances.
La longueur maximale de câble dépend de la vitesse de transmission.
Par exemple, on se limitera à 5 m dans le cas d’une transmission à 19 200 Baud. - RS-485
Ce type de connexion permet de transmettre des signaux sur de plus grandes distances :
De plus, il permet de connecter plusieurs appareils sur le même bus.
La longueur de câble maximale dépend aussi de la vitesse de transmission.
Typiquement, moyennant l’usage de résistances d’adaptation de ligne, on permet une longueur de 1200m jusqu’à une vitesse de transmission de 100 kbps.
Cette valeur maximale peut être limitée par les fabricants d’équipements. - USB
La norme USB ne permet pas de câble plus long que 5m.
Remarque : Il existe des répétiteurs qui permettent de prolonger cette longueur jusqu’à 15m.
- RS-232
Pourquoi faut-il brancher les électroniques et capteurs SENSY à la terre?
Réponse:
La mise à la terre consiste à relier à une prise de terre, par un fil conducteur, les masses métalliques qui risquent d'être mises accidentellement en contact avec le courant électrique par suite d'un défaut d'isolement dans un appareil électrique.
D'une part la mise à la terre permet d'écouler les courants de fuite sans danger.
D'autre part, en association avec un dispositif de coupure automatique (disjoncteur différentiel), elle assure la mise hors tension de l'installation électrique.
Pourquoi la mise en terre ?
Pour la sécurité des utilisateurs !
Prenons un exemple:
Une électronique SENSY qui n'est pas branchés sur une prise avec terre.
Une souris a dénudé le câble d'alimentation de cet appareil et les fils électriques se mettent en contact avec la carcasse de l'électronique.
Vous touchez le boitier et comme vous êtes sur un sol conducteur, vous êtes traversé par le courant électrique. C'est une électrocution.
La mise à la terre, associée au disjoncteur différentiel, évite tout incident.
Le courant passe directement dans la terre et l'alimentation est automatiquement coupée.
Plus d'électrocution, plus de danger !
Il faut mettre à la terre toutes les électroniques SENSY et capteurs !!!
La mise à la terre n'est efficace que si elle est associée à un dispositif différentiel.
Une bonne prise de terre doit avoir une résistance électrique déterminée en fonction de la sensibilité du dispositif différentiel de l'installation. la résistance maximale de la prise de terre doit être de 100 ohms.
Règles à suivre:
- Une prise de terre doit être éloignée de tout dépôt ou infiltration qui peut la corroder (ex : produits chimiques).
- Une prise de terre ne doit jamais être plongée dans l'eau.
- Il est interdit d'utiliser comme prise de terre les canalisations d'eau, de gaz ou de chauffage central et les gaines métalliques des câbles.
Quelle est la tenue en fatigue des capteurs et des couplemètres SENSY?
Les capteurs de force et les couplemètres statiques SENSY sont constitués essentiellement d’un corps d’épreuve métallique se déformant à la suite de l’application d’une contrainte mécanique.
Cette contrainte mécanique ne peut dépasser la limite élastique du matériau sous peine de détériorer voire de détruire le capteur.
Néanmoins, même pour des déformations inférieures à la limite élastique du matériau, on constate une détérioration du corps d’épreuve si ces sollicitations sont appliquées de façon répétitive.
Cette détérioration qui est au départ infime peut entraîner à terme la rupture du capteur.
Cette tenue en fatigue est caractérisée par un nombre de cycles garanti. Elle dépend du matériau, du taux de contrainte (µm/m) et du fait que cette contrainte soit uni- ou bidirectionnelle.
Pour les capteurs SENSY en acier, la tenue en fatigue est comme suit: Attention: ceci n’est pas valable pour certains types de capteurs pour lesquels la contrainte maximale n’est pas située à l’endroit où se trouvent les jauges extensométriques (ex : capteurs membrane).
Attention: ceci n’est pas valable pour certains types de capteurs pour lesquels la contrainte maximale n’est pas située à l’endroit où se trouvent les jauges extensométriques (ex : capteurs membrane).
Comment tarer un afficheur DIP-Fx-yz à l’aide d’un contact extérieur ?
Réponse:
Il est possible de tarer un afficheur DISP-Fx-yz à l’aide d’un contact extérieur libre de potentiel.
Pour ce faire il faut :
- S’assurer que le dip-switch « Calib’n lock » soit en position « lock » (on),
- Faire un contact temporaire entre les bornes 7 (Common) et 8 (CC.1).
Quelle est la précision d’un système de limitation de charge dont le capteur est un axe dynamométrique?
Réponse:
La précision de mesure d’un système de limitation de charge dépend de différents facteurs:
- La précision de l’axe dynamométrique
Un axe dynamométrique présente essentiellement des erreurs mécaniques (non-linéarité, hystérésis et non répétabilité). Elles dépendent des dimensions de l’axe (rapport longueur / diamètre qui ne peut être trop petit) ainsi que de la qualité des appuis.Pour les axes standards (série 5300), cette erreur représente ± 0,5 % de leur pleine échelle.Si nécessaire, cette erreur peut être ramenée à ± 0,2 % moyennant un profilage de l’axe (faisabilité à vérifier).
En revanche, si le rapport longueur/diamètre est trop petit cette erreur peut monter à 5 %.Les dérives thermiques de zéro et de sensibilité étant inférieures à 0,2 % de la pleine échelle/10°C, elles sont souvent négligeables par rapport aux erreurs mécanique. - La précision de l’électronique de limitation:
La précision d’une électronique de limitation de type Crane-Boy est de l’ordre de ±0,1%.L’erreur induite par cette électronique est donc généralement négligeable en comparaison aux autres erreurs. - Le poids du câble de levage:
Plus la charge est en hauteur, plus le câble est enroulé sur le tambour et donc moins supporté par l’axe dynamométrique.
Cela peut provoquer une erreur de plusieurs % entre la position basse et la position haute de la charge.
Pour éliminer cette erreur il faudra donc toujours faire la mesure à la même hauteur ou prévoir un système de correction tenant compte de la hauteur de levée. - Les frottements dans les poulies de levage:
Les poulies de levage présentent une résistance à la rotation. La conséquence de ces frottements est:- En montée: de diminuer la charge appliquée à l’axe dynamométrique
- En descente: de l’augmenter.Pour atténuer cette erreur, il conviendra d’effectuer l’étalonnage et les mesures de charge toujours après un même mouvement (à priori une montée).
- Les phénomènes dynamiques
Toute accélération ou décélération de la charge perturbera dans un sens ou l’autre la mesure de son poids.
Il est possible d’atténuer l’influence de ces perturbations par un filtrage adéquat au niveau de l’électronique de limitation mais cela est limité car le temps de réponse de la limitation de charge ne peut être trop long.
En conclusion:
Compte tenu d’un axe dynamométrique aux dimensions favorables et en faisant l’étalonnage et la mesure de charge toujours à la même hauteur, après une montée en petite vitesse, la précision de la mesure sera comprise entre ± 1 et 2 % de la charge maximale d’utilisation (CMU) de l’engin de levage.
Comment configurer la sortie RS232 de l'indicateur de pesage INDI5250 et de l'indicateur étalon (INDI-00)?
Réponse:
- Accéder au menu SETUP:
Appuyez sur la touche , introduire Fn49 via les touches
, introduire Fn49 via les touches  et
et 
Validez via la touche affichage SETUP
affichage SETUP
Validez via la touche
- Modifier les paramètres de communication:
Appuyez (1x) sur cette touche pour faire apparaître SETUP2, puis appuyez sur
pour faire apparaître SETUP2, puis appuyez sur 
Vérifiez tous les paramètres ci-dessous en appuyant
2.t = 02
2.c = 65
2.l = 01
2.r = 00
2.a = 00
2.f = 00
2.e = 1
2.1 = 0
2.2 = 0
2.3 = 0
2.4 = 0
2.5 = 0
2.6 = 0
2.7 = 0
2.8 = 0
2.d = 17
SETUP2
Appuyez sur la touche pour sortir
pour sortir - Modifier la vitesse de rafraichissement de l’affichage:
Appuyez sur la touche pour afficher « Par »
pour afficher « Par »
Appuyer sur la touche plusieurs fois jusqu’à l’apparition de « 6.P » et mettez « 14 » en utilisant la touche
plusieurs fois jusqu’à l’apparition de « 6.P » et mettez « 14 » en utilisant la touche 
Appuyer sur la touche pour valider
pour valider
Appuyez sur la touche pour sortir.
pour sortir. - Mémoriser les modifications:
Appuyez sur la touche 2x pour accéder à « STORE » et valider par
2x pour accéder à « STORE » et valider par 
- Câble à utiliser:
Le câble RS232 entre la sortie de l’INDI 5250 et par exemple un pc doit être croisé (TX et RX). - Paramètres de communication:
2400 bauds – ATTENTION
7 bits de data + 1 bit de parité
ou
8 bits de data + 0 bit de parité
1 bit de stop
Comment définir des seuils de déclenchement différents à partir d'un bouton sur nos limiteurs de charges digitaux?
Réponse
Nos limiteurs possèdent 2 listes de paramètres, la liste principale et la liste auxiliaire, pour passer de l'une à l'autre en appuyant sur F1 par ex, il faut aller dans le menu 2, et attribuer à F1, la fonction List. De cette manière, en appuyant sur F1, il s'affichera Load A et Load B correspondant respectivement à liste principale et liste auxiliaire.
Pour définir différents seuils, il suffit alors de spécifier SP1 lorsque l'on se trouve dans le mode "LOAD A" de faire de même après être passé dans le mode Load B.
Comment configurer les produits de la famille PAX pour récupérer la valeur affichée sur mon PC ou mon automate?
Réponse:
Configuration du Pax
- Configuration RS232
- PAr pour entrer dans le menu
- aller dans le menu 7 Srl avec F1
- bAUd = 9600
- dAtA = 8
- Addr = 0
- Abru = yes
- OPT = yes
- 6roSS = No
- tArE = no
- IMP = yes
- tot = no
- HILO = no
- Press PAR (sortir)
- Configuration fonction:
- Press PAR
- aller dans le menu 2 FNC
- Usr-1 = Print
- sortir
- Configuration Hardware:
Connecter le terminal 7 (COM) au terminal 8 (USR1).
Le Pax envoi sur la liaison RS232, la valeur lue.
Comment appliquer une résistance de calibration (Rcal) sur un capteur déjà livré ?
Réponse:
Remarques préalables :
- Cette procédure ne concerne que les capteurs en pont de Wheatstone et sans amplificateur interne. Le signal de sortie (Vout) et donc du type mV/V.
- Elle nécessite l’usage d’un millivoltmètre dont la précision est suffisante : (ex. :± 0,01 mV)
- Faire attention à la polarité des signaux mesurés
La valeur recommandée de Rcal dépend de la résistance du capteur et du signal que l’on veut générer.
Exemples:
- Pour un capteur dont la résistance est de 351 Ω, une Rcal de 50 kΩ engendrera un déséquilibre de ± 1,75 mV/V
- Pour un capteur dont la résistance est de 702 Ω, une Rcal de 120 kΩ engendrera un déséquilibre de ± 1,46 mV/V
Comment procéder:
- Mettre le capteur sous tension (ex : 10 VDC)
- Attendre quelques minutes
- Mesurer la tension d’alimentation (Vexc)
- Mesurer le signal de sortie du capteur à vide (Vo).Si le capteur n’est pas en charge, ce signal est inférieur à 1 % du signal maximum.
Ex. : -0.2mV < Vo <+0,2 mV (Vexc = 10 V, Vout = 2 mV/V) - Brancher la résistance de calibration entre les bornes Alimentation ‘’+’’ et Signal ‘’+’’Rem. Ce branchement peut aussi se faire entre les bornes Alimentation ‘’-’’ et Signal ‘’-’’ mais les résultats seront légèrement différents.
- Mesurer le signal de sortie (Vr)
- Calculer la variation du signal de sortie : Vcal (mV/V) = (Vr-Vo) / Vexc
- La grandeur mécanique (force ou couple) simulée est égale à : Etendue de Mesure (EM) * (Vcal/Vout)Cette valeur simulée n’est valable que pour le capteur, la Rcal et les bornes utilisées. Il est donc recommandé d’associer physiquement ces composants et de consigner les bornes utilisées ainsi que les valeurs calculées.
Exemple:
Soit un capteur de force
- Etendue de mesure (EM) : 100 kN
- Sensibilité annoncée sur le certificat de contrôle (Vout) : 2,000 mV/V
- Résistance annoncée sur le certificat de contrôle : 702 Ω
Soit une résistance de calibration (Rcal) : 120 kΩ
Mesures:
- Tension d’alimentation capteur (Vexc) : 10,2 V
- Signal capteur à vide (Vo) : + 0,02 mV
- Signal capteur avec Rcal branchée : + 14,62 mV
Résultats:
- Variation de signal de sortie Vcal= (Vr-Vo) / Vexc : (14,62-0,02) / 10,2 = 1,431 mV/V
- Force simulée Fcal = EM*(Vcal/Vout) : 100*(1,431 / 2,000) = 71,55 kN
Remarque: La précision de cette méthode dépend aussi de la précision avec laquelle est connue la sensibilité nominale du capteur (Vo) et donc par ailleurs aussi de l’erreur de répétabilité de celui-ci.
Quelle est la vitesse de rafraîchissement de nos cartes de communication pour les produits de la famille "PAX"?
Réponse:
- Transmission RS232:
2 à 50 ms - Transmission RS485:
50 à 100 ms - Lecture du PAX:
1, 2, 5,10 mesures / secondes (Menu 4 – paramètre : dSP-t) - Sortie Analogique:
Un réglage du paramètre udt à 0 (menu 8 – paramètre : udt) entraîne une fréquence de rafraîchissement de 20 fois par seconde.